Jetson nano串口的使用 |
您所在的位置:网站首页 › jetson nano 玩游戏 › Jetson nano串口的使用 |
Jetson nano串口的使用
|
UART串口使用两条杜邦线就可以实现数据发送和接收,可以很方便的与其他扩展进行数据连接,比如微雪的L76X GPS HAT就可以直接连接40Pin的GPIO接口通过UART串口进行数据传递。 接下来具体说明Jetson nano串口的使用: 1、首先下图是Jetson nano的所有通讯接口,其中红框框选的8、10是我们要用到的引脚。
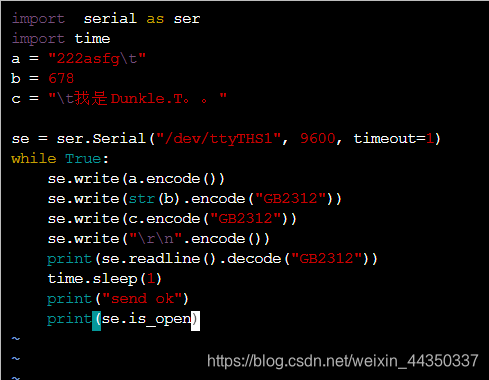
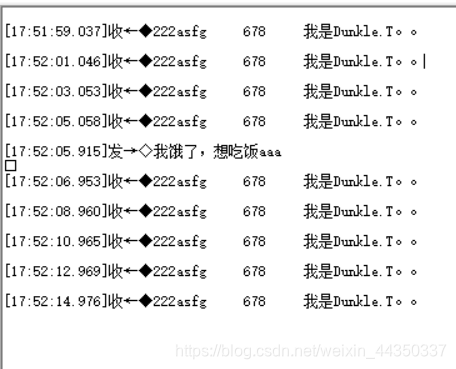
1 导入串口库 import serial as ser2 设置使用的引脚、波特率和超时时间 se = ser.Serial("/dev/ttyTHS1", 9600, timeout=1) 如果出现下面的错误:Serial Exception: [Errno 13] could not open port /dev/ttyTHS1: [Errno 13] Permission denied: '/dev/ttyTHS1' 这是因为没有权限,使用下面的命令设置其权限为可读可写可执行sudo chmod 777 /dev/ttyTHS13 使用write函数进行数据的发送(注意发送类型必须是字节,因此需要使用encode()函数进行转换) se.write("666".encode())decode()可以传入指定的编码名称来做指定编码,如: se.write("666".encode("GB2312"))或者直接在字符串前边加b: ser.write(b'hello')如果你要用电脑USB转TTL接收数据: 1 安装USB转TTL驱动 2 安装串口调试助手 3 正确连线USB转TTL模块和板子 4 选择USB转TTL模块的正确串口,波特率和 2 中保持一致,数据位8,停止位1,无校验位。 5 打开串口,运行程序,得到数据显示。 4 读取数据 读取指定长度使用: s = ser.read(100) 100就是读取100个字符,你可以传入其他长度参数读取一行(当读到 ‘\n’ 时,视当前读到的内容为一行。 ) line = ser.readline()读取的都是原始字节,需要用decode()函数进行解码进行输出: print(line.decode("GB2312"))5 串口状态 打开串口: ser.open()检测串口是否打开: ser.is_open 返回值为True 或 False串口关闭 ser.close()检查串口是否关闭 ser.is_open 返回值为True 或 False6 其他设置串口的写法 逐个设置: ser = serial.Serial() ser.baudrate = 19200 ser.port = 'COM1' ser.open() ser.close() COM1就是上边2中的第一个参数19200就是上边2中的第二个参数上下文写法: serial.Serial() as ser: ser.baudrate = 19200 ser.port = 'COM1' ser.open() ser.write(b'hello')COM需要调用open(),close(),UART不需要。 7 最后,官方文档: https://pythonhosted.org/pyserial/shortintro.html#opening-serial-ports 4、最后附上我的测试代码及测试结果:
|


【本文地址】
今日新闻 |
推荐新闻 |